Introduction
The Universal Serial Bus On-The-Go (USB OTG) is originally supported by Linux USB subsystem with Realtek’s dedicatedly designed USB PHY driver and a few changes at DWC2 USB controller driver.
Architecture
The USB software architecture is illustrated in the following figure.

USB software architecture
Implementation
The original USB is supported by Linux USB subsystem.
File |
Description |
|---|---|
<linux>/drivers/usb/dwc2/ |
DWC2 host & device controller driver, with changes by Realtek |
<linux>/drivers/usb/core/ |
HCD core |
<linux>/drivers/usb/gadget/ |
Gadget core |
<linux>/drivers/usb/gadget/function/ |
Device classes, such as ADB, CDC ACM, HID, MSC, etc. |
<linux>/drivers/usb/class/cdc-acm.* |
CDC ACM host class |
<linux>/drivers/usb/storage/* |
MSC host class |
For more details of USB subsystem, refer to https://www.kernel.org/doc/html/v5.4/usb/index.html.
Realtek USB PHY driver is implemented as following files:
File |
Description |
|---|---|
<linux>/drivers/rtkdrivers/usb_phy/Kconfig |
USB PHY driver Kconfig |
<linux>/drivers/rtkdrivers/usb_phy/Makefile |
USB PHY driver Makefile |
<linux>/drivers/rtkdrivers/usb_phy/phy-rtk-usb.c |
USB PHY functions |
<linux>/drivers/rtkdrivers/usb_phy/phy-rtk-usb.h |
USB PHY API declaration |
Configuration
DTS Configuration
USB PHY DTS Configuration
USB PHY DTS node is defined in <dts>/rtl8730e-ocp.dtsi:
usb_phy: usb-phy@41000000 {
compatible = "realtek,otg-phy";
reg = <0x400B0000 0x20>,
<0x41000060 4>,
<0x42000100 0x10>,
<0x4200825C 4>;
#phy-cells = <0>;
clocks = <&rcc RTK_CKE_USB>;
rtk,cal-data = <0x00 0xE0 0x9D>,
<0x00 0xE1 0x19>,
<0x00 0xE2 0xDB>,
<0x00 0xE4 0x68>,
<0x01 0xE5 0x0A>,
<0x01 0xE6 0xD8>,
<0x02 0xE7 0x52>,
<0x01 0xE0 0x04>,
<0x01 0xE0 0x00>,
<0x01 0xE0 0x04>;
rtk,usb-phandle = <&usb>;
rtk,usb-force-role-en = <1>;
status = "okay";
};
The DTS configurations of USB PHY are listed below:
Property |
Description |
Configurable? |
|---|---|---|
compatible |
ID to match the Realtek USB PHY driver with the USB PHY device |
No |
reg |
USB PHY register resource |
No |
#phy-cells |
Indicates how many cells are needed to specifically describe a USB PHY, fixed at 0 for only one USB phy |
No |
clocks |
The clock source of USB PHY |
No |
rtk,cal-data |
The calibration data of USB PHY |
No |
rtk,usb-phandle |
The USB Pointer Handle of USB PHY |
No |
rtk,usb-force-role-en |
Enables forced switching between USB Host and Device modes. |
1/0 |
status |
USB PHY status |
disabled/okay |
USB PHY node is enabled by default. To disable it, overwrite the node status to disabled by node reference in higher level DTS file, such as chip specific DTS file or board specific DTS file:
&usb_phy{
status = "disabled";
};
USB DTS Configuration
USB PHY DTS node is defined in <dts>/rtl8730e-ocp.dtsi:
usb: usb@40080000 {
compatible = "realtek,dwc-otg";
reg = <0x40080000 0x20000>;
interrupts = <GIC_SPI 39 IRQ_TYPE_LEVEL_HIGH>;
g-rx-fifo-size = <512>;
g-np-tx-fifo-size = <256>;
g-tx-fifo-size = <128 120>;
status = "okay";
endpoints {
ep1in {
ep_name = "ep1in";
ep_type = <0x0E>; // USB_EP_CAPS_TYPE_ALL
};
ep2out {
ep_name = "ep2out";
ep_type = <0x0E>; // USB_EP_CAPS_TYPE_ALL
};
ep3in {
ep_name = "ep3in";
ep_type = <0x0E>; // USB_EP_CAPS_TYPE_ALL
};
ep4out {
ep_name = "ep4out";
ep_type = <0x0E>; // USB_EP_CAPS_TYPE_ALL
};
ep5in {
ep_name = "ep5in";
ep_type = <0x0E>; // USB_EP_CAPS_TYPE_ALL
};
ep5out {
ep_name = "ep5out";
ep_type = <0x0E>; // USB_EP_CAPS_TYPE_ALL
};
};
};
The DTS configurations of USB are listed below:
Property |
Description |
Configurable? |
|---|---|---|
compatible |
ID to match the DWC2 controller driver with the USB OTG device |
No |
reg |
USB register resource |
No |
interrupts |
The GIC interrupt for USB |
No |
g-rx-fifo-size |
The periodic Rx FIFO size for the USB device (unit: DWORDS). |
16~512 |
g-np-tx-fifo-size |
The non-periodic Tx FIFO size for the USB device (unit: DWORDS). |
16~256 |
g-tx-fifo-size |
An array of TX FIFO sizes in dedicated FIFO mode. Each value corresponds to one EP starting (unit: DWORDS). Realtek USB works in shared FIFO mode, therefore this configuration will be ignored. |
16~256 |
status |
USB device status |
disabled/okay |
endpoints |
Allows USB Endpoint address configuration to meet specific client requirements. |
Yes |
Note
The total Data FIFO depth is 1016, that means the result of g-rx-fifo-size + g-np-tx-fifo-size + g-tx-fifo-size should not be larger than 1016.
DO NOT change the default configurations unless indeed necessary.
The USB node is enabled by default. To disable it, overwrite the node status to disabled by node reference in higher level DTS file, such as chip specific DTS file or board specific DTS file:
&usb{
status = "disabled";
};
Build Configuration
The USB functions can be configured as built-in functions in kernel image or independent kernel modules.
Build-in Configuration
To build USB functions into kernel image:
Select
Yfor .
Select
Yfor .
Select required USB mode.
For host mode, select
Yfor .For device mode, select
Yfor .For OTG mode, select
Yfor both and .
Select
Yfor .
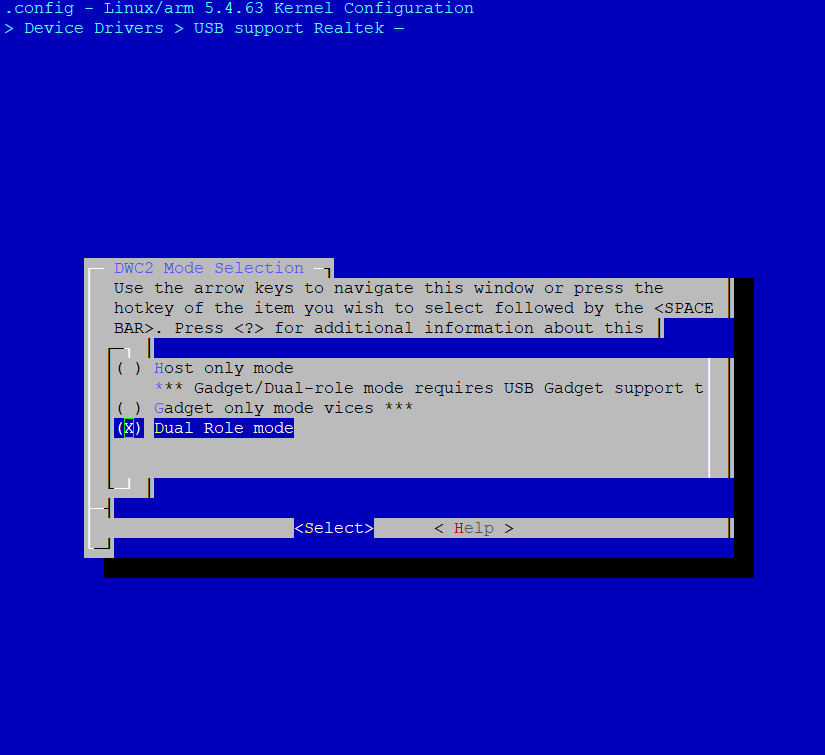
Check DWC2 mode selection.
For USB host, select
Yfor Host only modeFor USB device, select
Yfor Gadget only modeFor USB OTG mode, select
Yfor Dual Role mode.
Select configurations for required class, refer to the following sections for details.
Module Configuration
To build USB functions as kernel modules:
Select
Mfor driver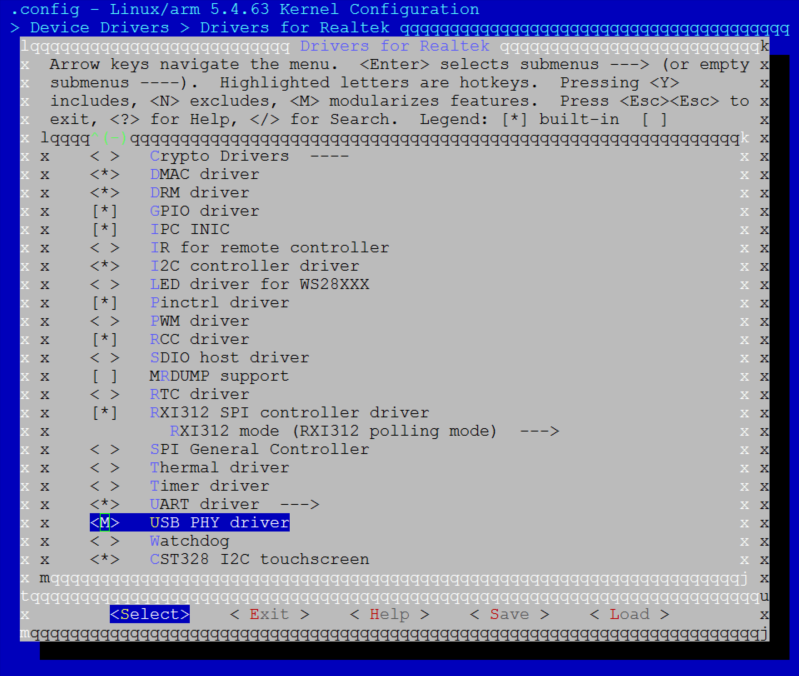
Select
Yfor .
Select required USB mode.
For host mode, select
Mfor .For device mode, select
Mfor .For OTG mode, select
Mfor both and .
Select
Mfor .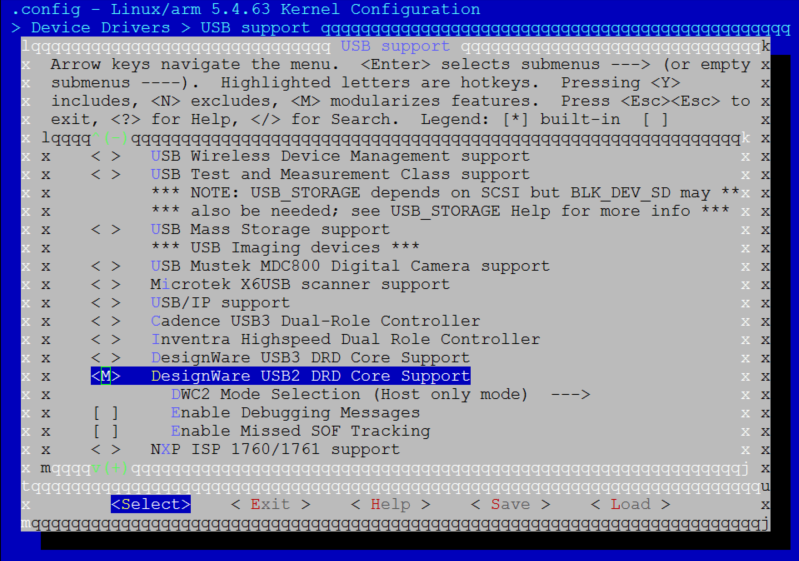
Check DWC2 mode selection.
For USB host, select
Yfor Host only modeFor USB device, select
Yfor Gadget only modeFor USB OTG mode, select
Yfor Dual Role mode.
Select configurations for required class, refer to the following sections for details.
Load kernel modules at runtime
Where the
<kernel_ver>below depends on the kernel version, such as 5.4.63.For host mode, type the following command sequences to load USB common host drivers before loading any USB class specific modules:
insmod /lib/modules/<kernel_ver>/kernel/drivers/rtkdrivers/usb_phy/phy-rtk-usb.ko insmod /lib/modules/<kernel_ver>/kernel/drivers/usb/common/usb-common.ko insmod /lib/modules/<kernel_ver>/kernel/drivers/usb/core/usbcore.ko insmod /lib/modules/<kernel_ver>/kernel/drivers/usb/dwc2/dwc2.ko
For device mode, type the following command sequences to load USB common device drivers before loading any USB class specific modules:
insmod /lib/modules/<kernel_ver>/kernel/drivers/rtkdrivers/usb_phy/phy-rtk-usb.ko insmod /lib/modules/<kernel_ver>/kernel/drivers/usb/common/usb-common.ko insmod /lib/modules/<kernel_ver>/kernel/drivers/usb/gadget/udc/udc-core.ko insmod /lib/modules/<kernel_ver>/kernel/drivers/usb/gadget/libcomposite.ko insmod /lib/modules/<kernel_ver>/kernel/drivers/usb/dwc2/dwc2.ko
USB Host Usage
In USB host mode, USB OTG can enumerate the attached USB device and initiate the USB transfer.
Only the usage of several host classes are described in this section, for more information, refer to https://www.kernel.org/doc/html/v5.4/usb/index.html.
CDC ACM Class
Configuration
Besides the common USB host configurations, extra configurations are required to support USB CDC ACM class driver, and user can choose to configure it as built-in functions or independent kernel modules.
The following configurations provide an example to support a typical CDC ACM device: USB serial port.
Adjust the configurations as required.
Built-in Configuration
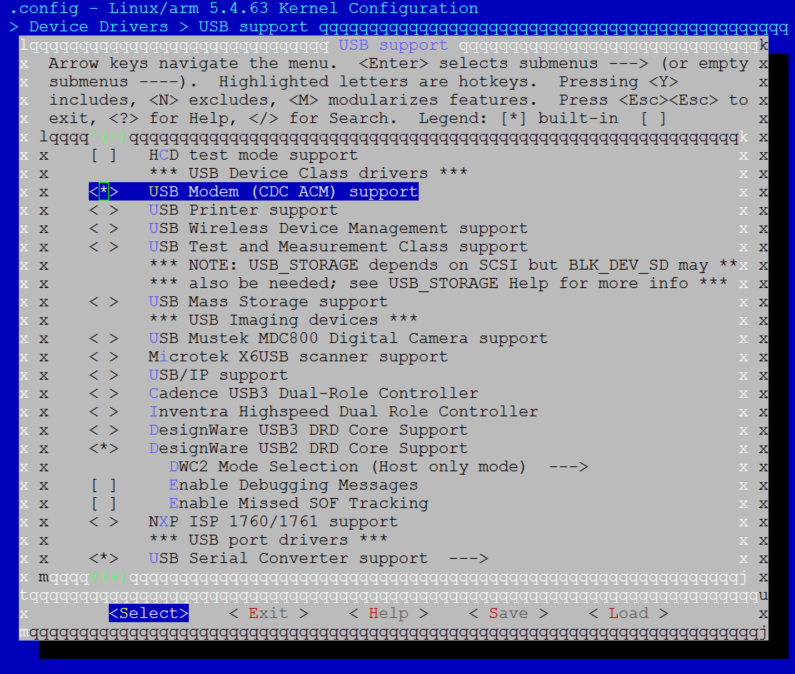
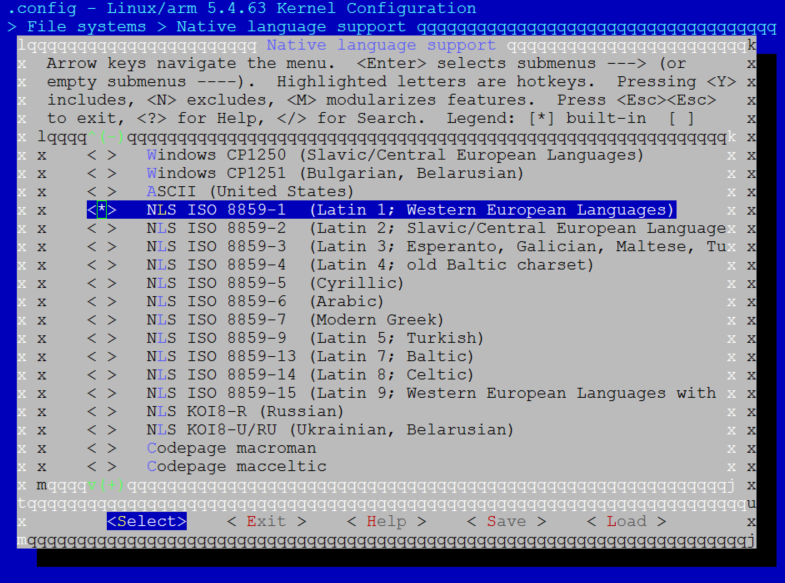
Enter USB support menu, type Y to select USB Modem (CDC ACM) support and USB Serial Converter support options:
Module Configuration
Enter USB support menu, type
Mto select USB Modem (CDC ACM) support and USB Serial Converter support options: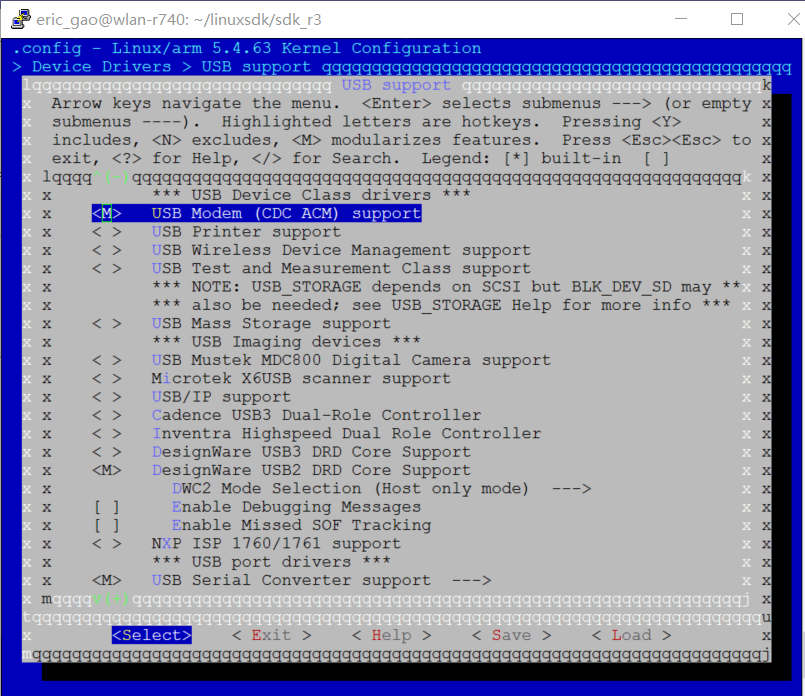
Load kernel modules for CDC ACM class after loading common USB host modules.
insmod /lib/modules/<kernel_ver>/kernel/drivers/usb/class/cdc-acm.ko insmod /lib/modules/<kernel_ver>/kernel/drivers/usb/serial/usbserial.ko
APIs for Application
Usage
Once configured as a CDC ACM host, the SoC will recognize the attached CDC ACM device as a TTY device, and will be able to communicate with the CDC ACM device through TTY interface.
Connect a CDC ACM device to SoC with USB cable, the following log will be printed on the console:
dwc2 40080000.usb: Set speed to high-speed usb 1-1: new high-speed USB device number 2 using dwc2 dwc2 40080000.usb: Set speed to high-speed cdc_acm 1-1:1.0: ttyACM0: USB ACM device
Communicate with the CDC ACM device through device node
/dev/ttyACM0, for example:Send data to CDC ACM device:
echo helloworld > /dev/ttyACM0
Receive data from CDC ACM device:
cat /dev/ttyACM0
Refer to <sdk>/tests/usbh_cdc_acm for CDC ACM host demo.
Mass Storage Class
Configuration
Besides the common USB host configurations, extra configurations are required to support USB mass storage class driver, and user can choose to configure it as built-in functions or independent kernel modules.
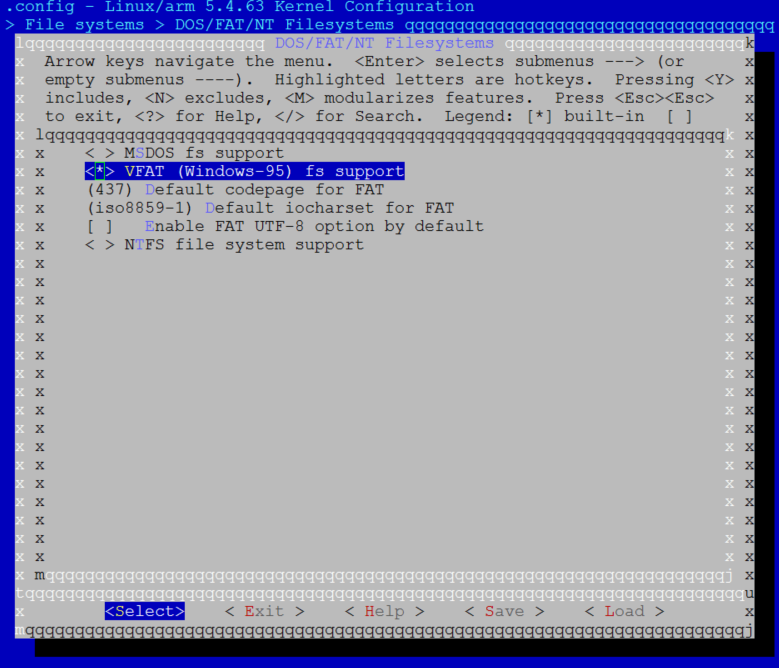
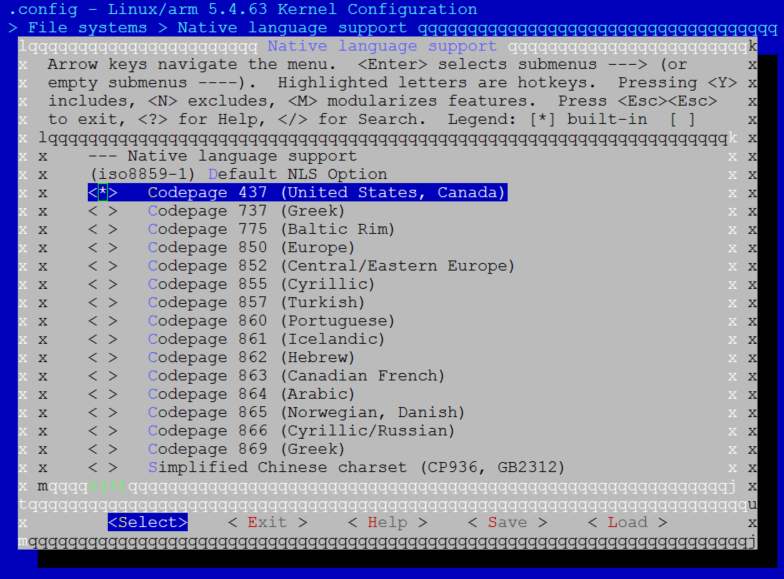
The following configurations provide an example to support a typical mass storage device: UDISK with Realtek card reader solution and formatted with FAT32 file system.
Common configurations required by USB mass storage class driver:
and :
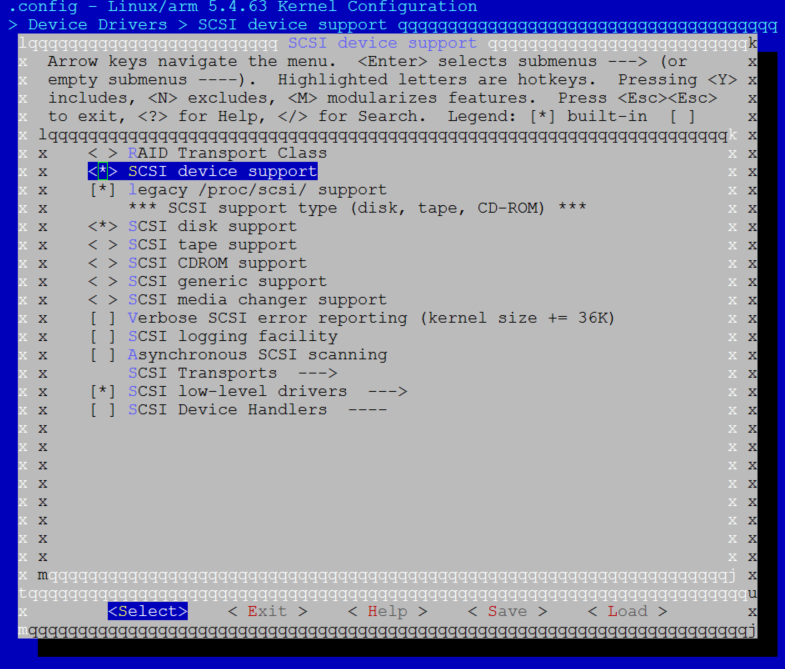
:
and :
Adjust the configurations as required.
Built-in Configuration
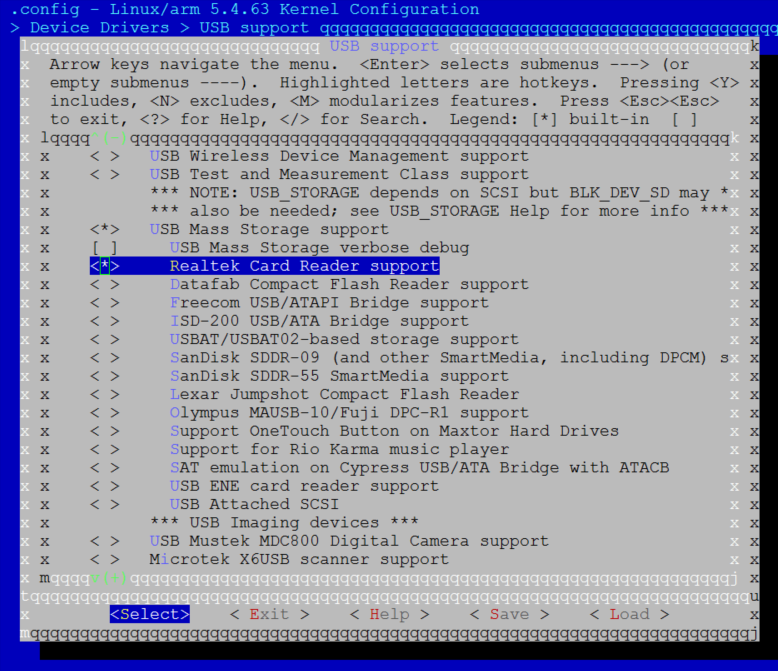
Enter USB support menu, type Y to select USB Mass Storage support and Realtek Card Reader support options:
Module Configuration
Enter USB support menu, type
Mto select USB Mass Storage support and then Realtek Card Reader support options: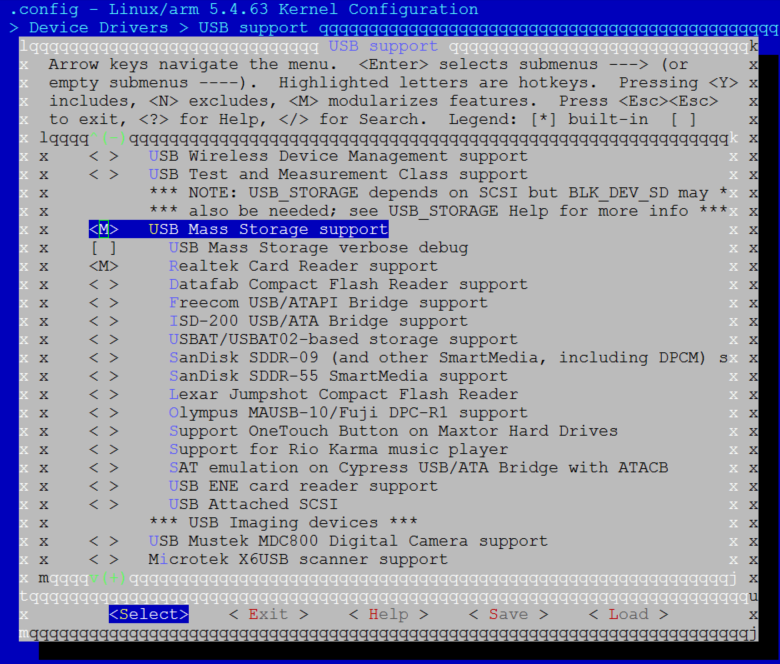
Load kernel modules for mass storage class after loading common USB host modules.
insmod /lib/modules/<kernel_ver>/kernel/drivers/usb/storage/usb-storage.ko insmod /lib/modules/<kernel_ver>/kernel/drivers/usb/storage/ums-realtek.ko
APIs for Application
Usage
Here is the example to test the USB host mass storage driver with supported UDISK.
Connect an UDISK to SoC, the following log will be printed on console.
usb 1-1: USB disconnect, device number 2 dwc2 40080000.usb: Set speed to high-speed usb 1-1: new high-speed USB device number 3 using dwc2 dwc2 40080000.usb: Set speed to high-speed usb-storage 1-1:1.0: USB Mass Storage device detected scsi host0: usb-storage 1-1:1.0 scsi 0:0:0:0: Direct-Access TOSHIBA USB FLASH DRIVE PMAP PQ: 0 ANSI: 6 sd 0:0:0:0: [sda] 30253056 512-byte logical blocks: (15.5 GB/14.4 GiB) sd 0:0:0:0: [sda] Write Protect is off sd 0:0:0:0: [sda] Write cache: disabled, read cache: enabled, doesn't support DPO or FUA sda: sda1 sd 0:0:0:0: [sda] Attached SCSI removable disk
Mount UDISK device.
mkdir /mnt/udisk mount -t vfat /dev/sda1 /mnt/udisk
Access UDISK device. Create a file and write/read it.
cd /mnt/udisk echo hello >> test.txt cat test.txt hello
Unmount UDISK device
umount /mnt/udisk
Disconnect the UDISK device
usb 1-1: USB disconnect, device number 2
UVC Class
Configuration
Besides the common USB host configurations, extra configurations are required to support USB UVC class driver, and user can choose to configure it as built-in functions or independent kernel modules.
The following configurations provide an example to support a typical UVC device: UVC camera.
Common configurations required by UVC camera, selected as default in SDK:
:
Built-in Configuration
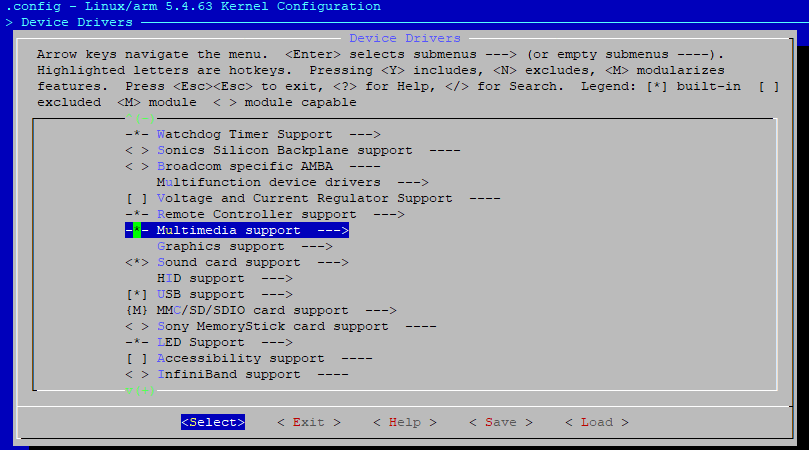
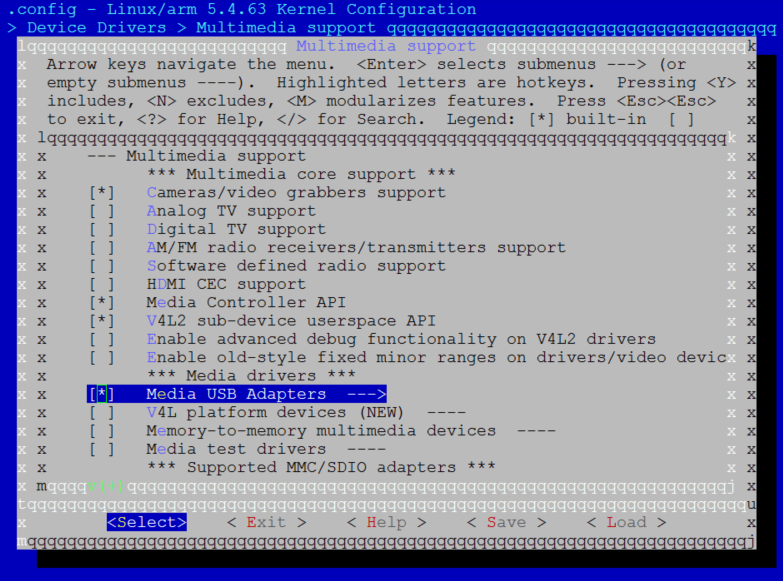
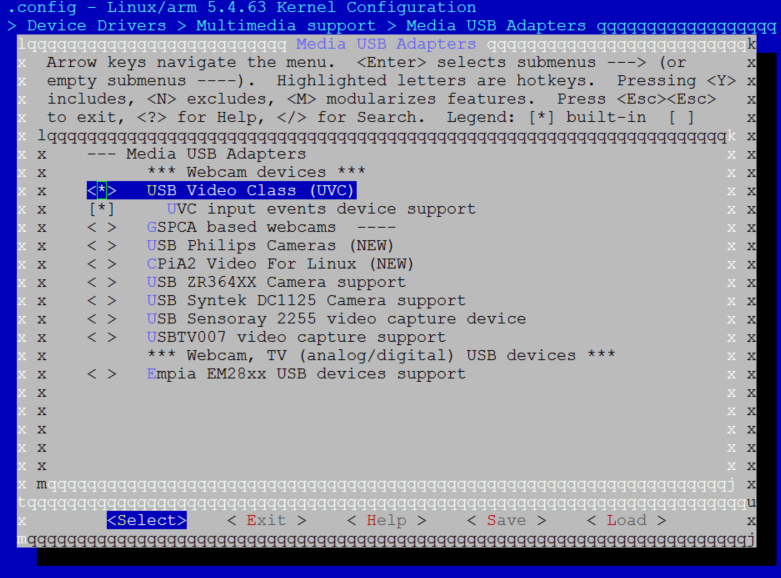
Enter Media USB Adapters and type Y to select USB Video Class (UVC):
Module Configuration
Enter Media USB Adapters and type
Mto select USB Video Class (UVC) :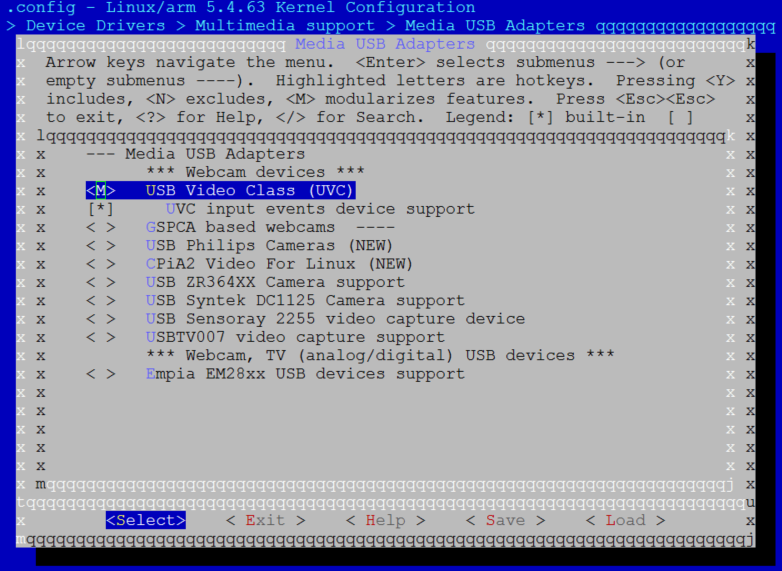
Load kernel modules about UVC class after loading common USB host modules.
insmod /lib/modules/<kernel_ver>/kernel/drivers/media/usb/uvc/uvcvideo.ko
APIs for Application
It treats UVC device as a V4L2 device. Refer to https://www.kernel.org/doc/html/latest/userspace-api/media/v4l/v4l2.html to get more information about V4L2 API.
Usage
The following is a usage simple for a typical UVC device: USB camera.
Once the USB camera is plugged into USB cable, the following log will print on console.
dwc2 40080000.usb: Set speed to high-speed
usb 1-1: new high-speed USB device number 2 using dwc2
dwc2 40080000.usb: Set speed to high-speed
uvcvideo: Found UVC 1.00 device USB Camera (0bda:5842)
input: USB Camera: USB Camera as /devices/platform/ocp/40080000.usb/usb1/1-1/1-1:1.0/input/input1
User can use IOCTL with V4L2 library API to access USB camera.
Find the UVC demo at <sdk>/tests/usbh_uvc, which is an example that capture image from UVC camera and save it to a SD card.
Note
SD card shall be mounted before running the UVC demo.
Vendor Class
Vendor class is designed for user to develop customized USB host class.
Configuration
Besides the common USB host configurations, extra configurations are required to support USB vendor class driver, and user can choose to configure it as built-in functions or independent kernel modules.
Built-in Configuration
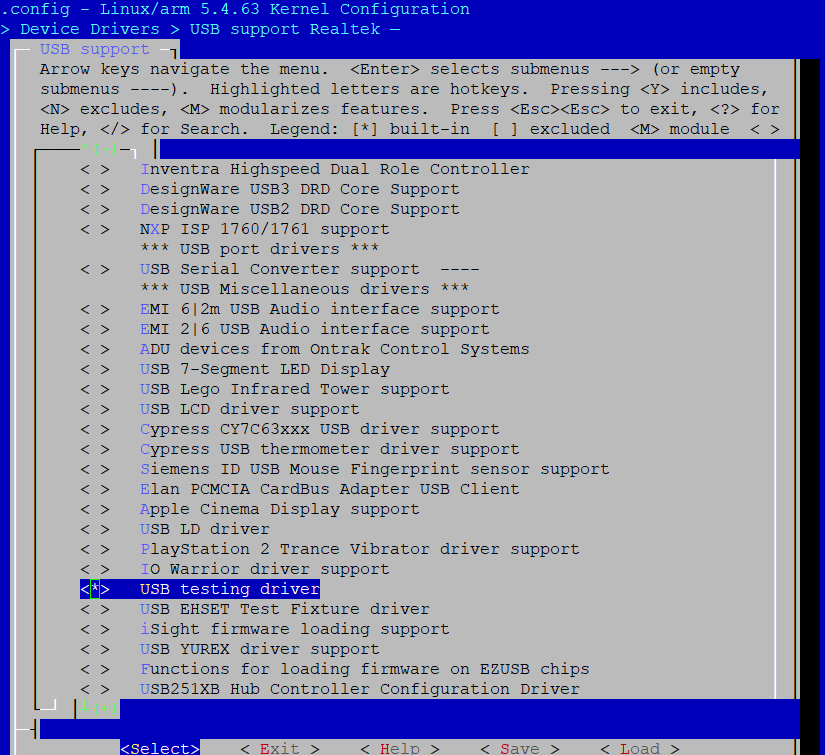
Type Y to select USB testing driver:
Module Configuration
Type
Mto select USB testing driver: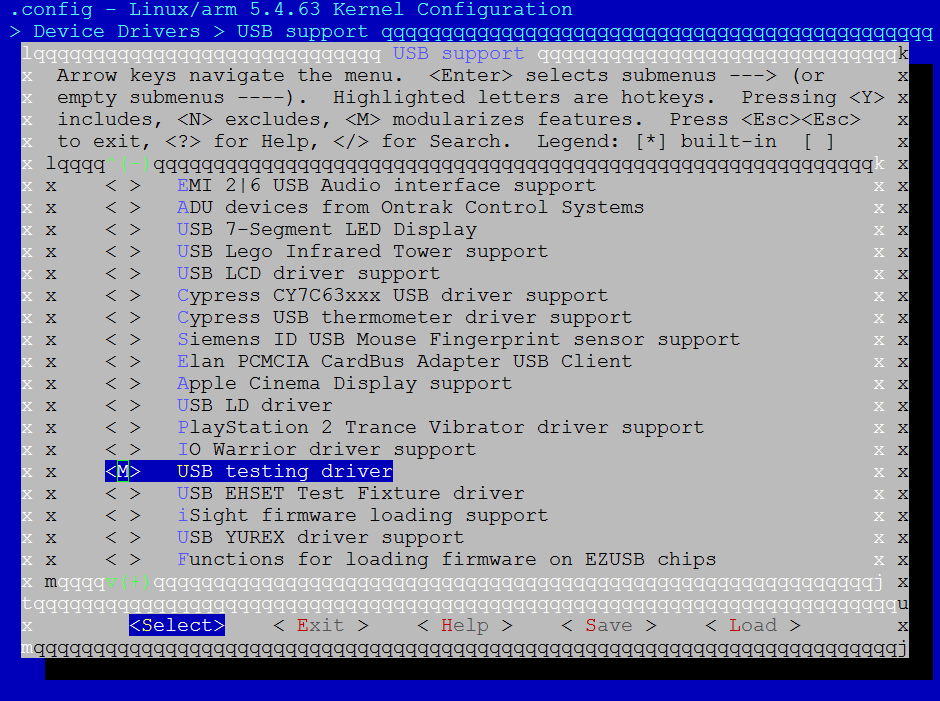
Load kernel modules about vendor class after loading common USB host modules.
insmod /lib/modules/<kernel_ver>/kernel/drivers/usb/misc/usbtest.ko
APIs for Application
None.
Usage
Find the USB host vendor demo for user space at <sdk>/tests/usbh_vendor.
USB Gadget Usage
In USB gadget mode, USB OTG can be enumerated by the attached USB host and response the USB transfer requests.
There are two configuration mode for USB gadget classes:
Configfs mode: USB Gadget functions configurable through configfs
Legacy mode: USB Gadget precomposed configurations
The configfs mode is adopted in this section.
Only the usage of several device classes are described in this section, refer to https://www.kernel.org/doc/html/v5.4/usb/index.html for more information.
CDC ACM Class
Configuration
Besides the common USB device configurations, extra configurations are required to support USB CDC ACM class, and user can choose to configure it as built-in functions or independent kernel modules.
Built-in Configuration
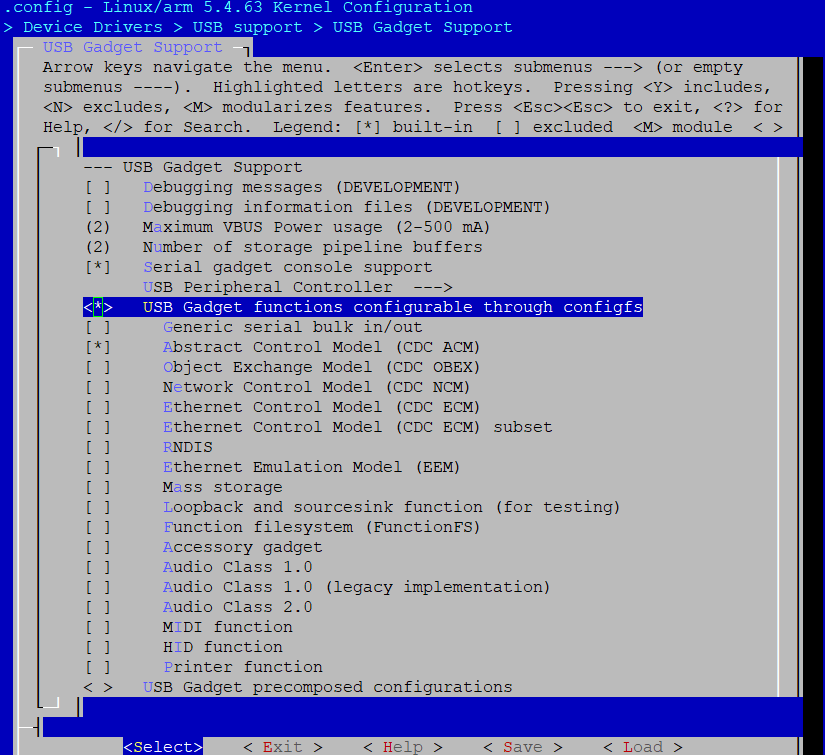
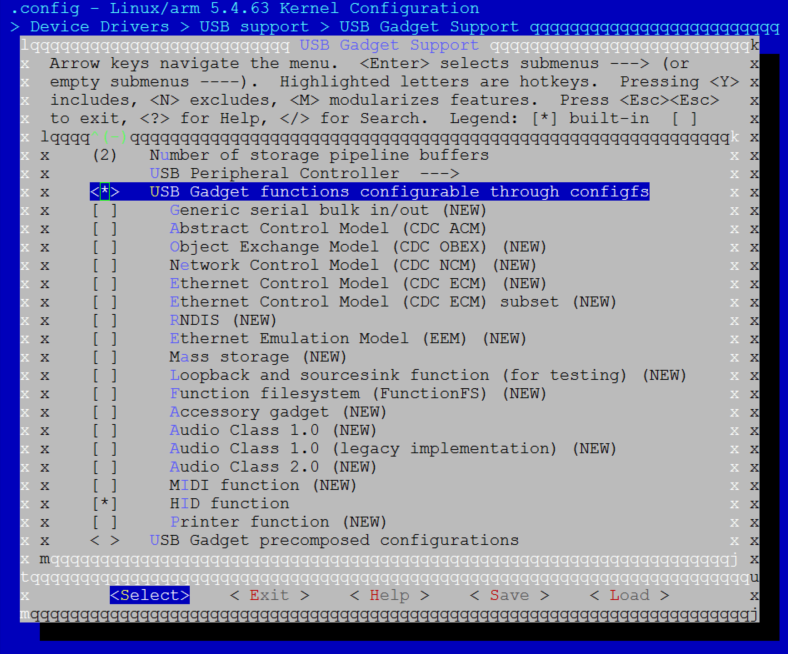
Type Y to select the following options in USB Gadget Support:
USB Gadget functions configurable through configfs
Serial gadget console support
Abstract Control Model (CDC ACM)
Module Configuration
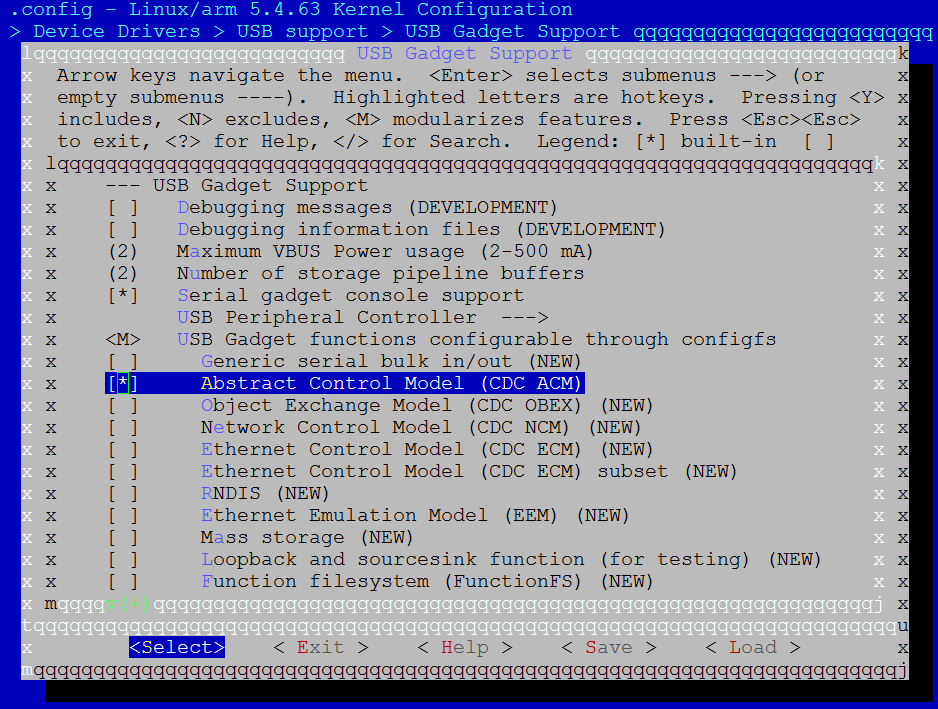
Select the following options in USB Gadget Support:
Type
Mto select USB Gadget functions configurable through configfsType
Yto select Serial gadget console supportType
Yto select Abstract Control Model (CDC ACM)
Load kernel modules about CDC ACM class after loading common USB device modules.
insmod /lib/modules/<kernel_ver>/kernel/drivers/usb/gadget/function/u_serial.ko insmod /lib/modules/<kernel_ver>/kernel/drivers/usb/gadget/function/usb_f_acm.ko
APIs for Application
Usage
Here is an example to set the board as a CDC ACM device.
Connect the board to PC via USB cable.
Run the following commands in board console.
mkdir /mnt/config mount none /mnt/config -t configfs cd /mnt/config/usb_gadget mkdir cdc && cd cdc echo 0x0200 > bcdUSB echo 0x02 > bDeviceClass echo 0x02 > bDeviceSubClass echo 64 > bMaxPacketSize0 echo 0x8730 > idProduct echo 0x0BDA > idVendor mkdir strings/0x409 echo "Realtek" > strings/0x409/manufacturer echo "VCOM" > strings/0x409/product echo "123456789AB" > strings/0x409/serialnumber mkdir configs/c.1 echo 120 > configs/c.1/MaxPower mkdir configs/c.1/strings/0x409 echo "acm" > configs/c.1/strings/0x409/configuration mkdir functions/acm.ttyS1 ln -s functions/acm.ttyS1 configs/c.1/ echo 40080000.usb > UDC
Find the correct COM on PC, and open it.
Send
12345from board to PC COM.Input command from board console:
echo 12345 > /dev/ttyGS0
PC COM will receive string
12345.Receive strings from PC COM.
Input command from board console:
cat /dev/ttyGS0
Send string
12345from PC COM, then board will receive string12345.
Note
Win7 cannot drive CDC ACM device directly. Specific driver needs to be installed: <sdk>/tools/image_tool/RtkUsbCdcAcmSetup.INF. And the PID / VID in this driver should be consistent with the CDC ACM device descriptor.
Note
If PC COM cannot be opened, comment following code in <linux>/drivers/usb/gadget/function/f_acm.c for temporary workaround:
static int acm_cdc_notify(struct f_acm *acm, u8 type, u16 value,
void *data, unsigned length)
{
/* ep_queue() can complete immediately if it fills the fifo... */
spin_unlock(&acm->lock);
//status = usb_ep_queue(ep, req, GFP_ATOMIC);
spin_lock(&acm->lock);
}
HID Class
Configuration
Besides the common USB device configurations, extra configurations are required to support USB HID class, and user can choose to configure it as built-in functions or independent kernel modules.
Make sure HID bus support and Generic HID driver are selected:
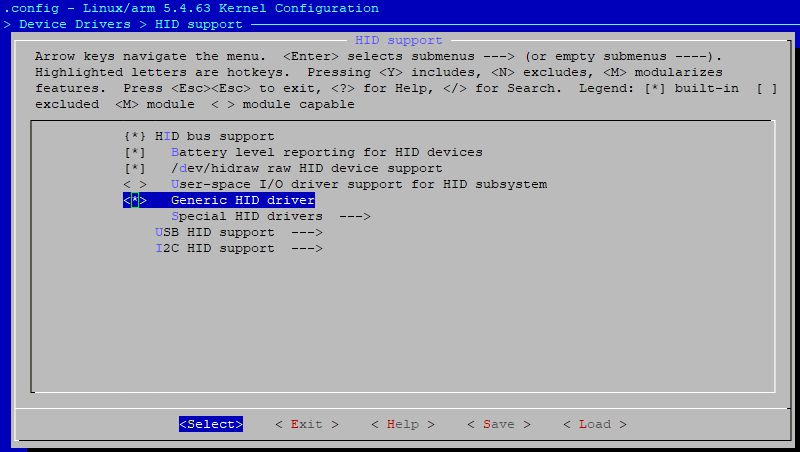
Actually, above configurations are enabled as default in SDK to support ADB.
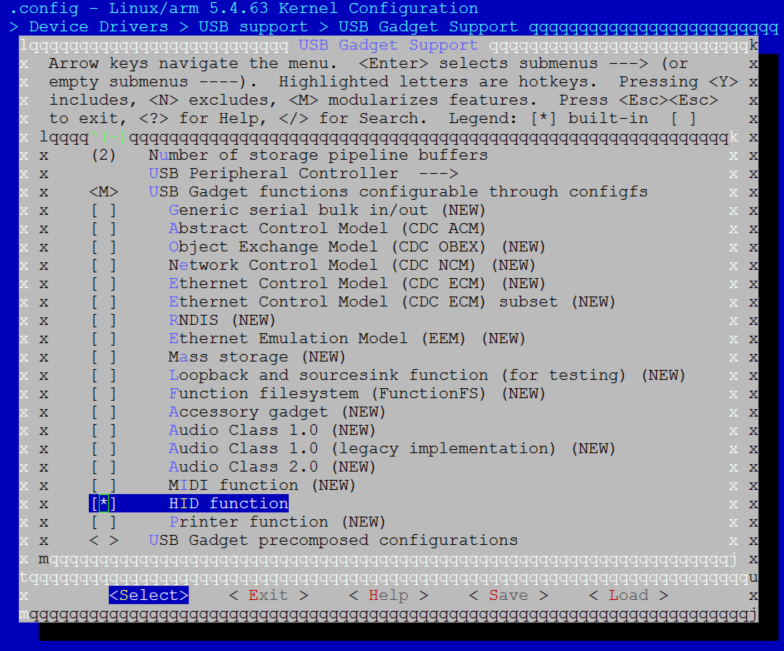
Built-in Configuration
Type
Yto select the following options in USB Gadget Support:USB Gadget functions configurable through configfs
Serial gadget console support
HID function
Module Configuration
Select the following items in USB Gadget Support:
Type
Mto select USB Gadget functions configurable through configfsType
Yto select HID function
Load kernel modules about HID class after loading common USB device modules:
insmod /lib/modules/<kernel_ver>/kernel/drivers/usb/gadget/function/udc-core.ko insmod /lib/modules/<kernel_ver>/kernel/drivers/usb/gadget/function/usb_f_hid.ko
APIs for Application
Usage
Here is an example to set the board as a HID mouse device.
Configure USB device:
mkdir /mnt/config mount none /mnt/config -t configfs cd /mnt/config/usb_gadget mkdir hid cd hid echo 0x0200 > bcdUSB echo 0x03 > bDeviceClass echo 0x00 > bDeviceSubClass echo 64 > bMaxPacketSize0 echo 0x8730 > idProduct echo 0x0BDA > idVendor mkdir strings/0x409 echo "Realtek" > strings/0x409/manufacturer echo "HID" > strings/0x409/product echo "123456789AB" > strings/0x409/serialnumber mkdir configs/c.1 echo 120 > configs/c.1/MaxPower mkdir configs/c.1/strings/0x409 echo "Primary configuration" > configs/c.1/strings/0x409/configuration
Configure HID report descriptor:
mkdir functions/hid.usb0 echo 1 > functions/hid.usb0/subclass echo 2 > functions/hid.usb0/protocol echo 4 > functions/hid.usb0/report_length echo -ne\\x05\\x01\\x09\\x02\\xa1\\x01\\x09\\x01\\xa1\\x00\\x05\\x09\\x19\\x01\\x29\\x03\\x15\\x00\\x25\\x01\\x95\\x03\\x75\\x01\\x81\\x02\\x95\\x01\\x75\\x05\\x81\\x03\\x05\\x01\\x09\\x30\\x09\\x31\\x09\\x38\\x15\\x81\\x25\\x7f\\x75\\x08\\x95\\x03\\x81\\x06\\xc0\\xc0> functions/hid.usb0/report_desc ln -s functions/hid.usb0 configs/c.1/ echo 40080000.usb > UDC
Once connect the board to HID host, use can use interface “/dev/hidg0” to communicate with host. The following is an example that make the cursor move 0x40 pixels to the right and down:
echo -ne "\0\x40\x40\0" > /dev/hidg0
The following is mouse protocol.
BYTE0
|-- bit7~bit3: RSVD
|-- bit2: middle button press
|-- bit1: right button press
|-- bit0: left button press
BYTE1: x-axis value, -128~127
BYTE2: y-axis value, -128~127
BYTE3: wheel value, -128~127
Mass Storage Class
Configuration
Besides the common USB device configurations, extra configurations are required to support USB mass storage class, and user can choose to configure it as built-in functions or independent kernel modules.
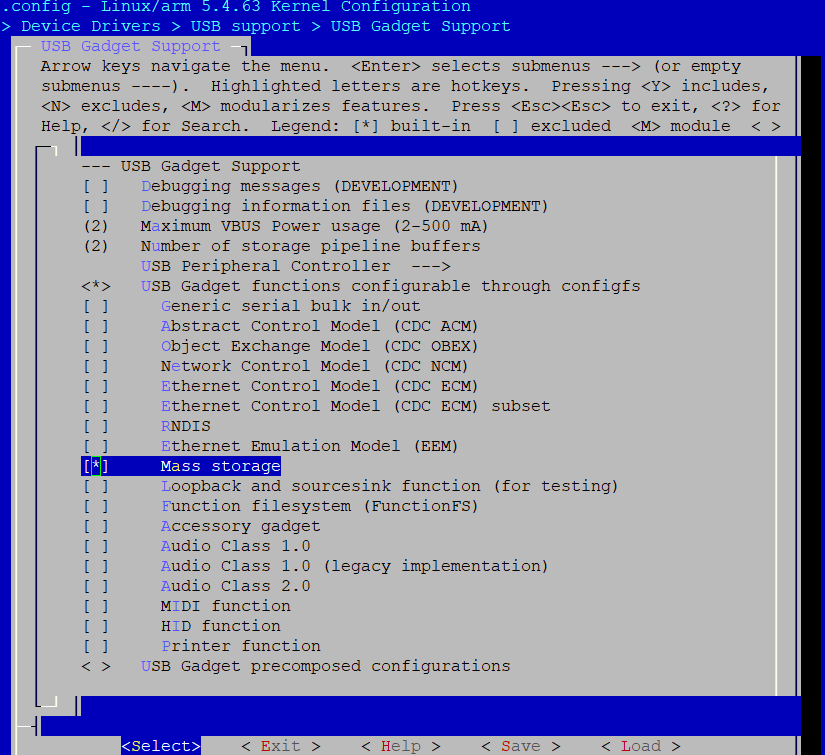
Built-in Configuration
Type
Yto select the following options in USB Gadget Support:USB Gadget functions configurable through configfs
Mass storage
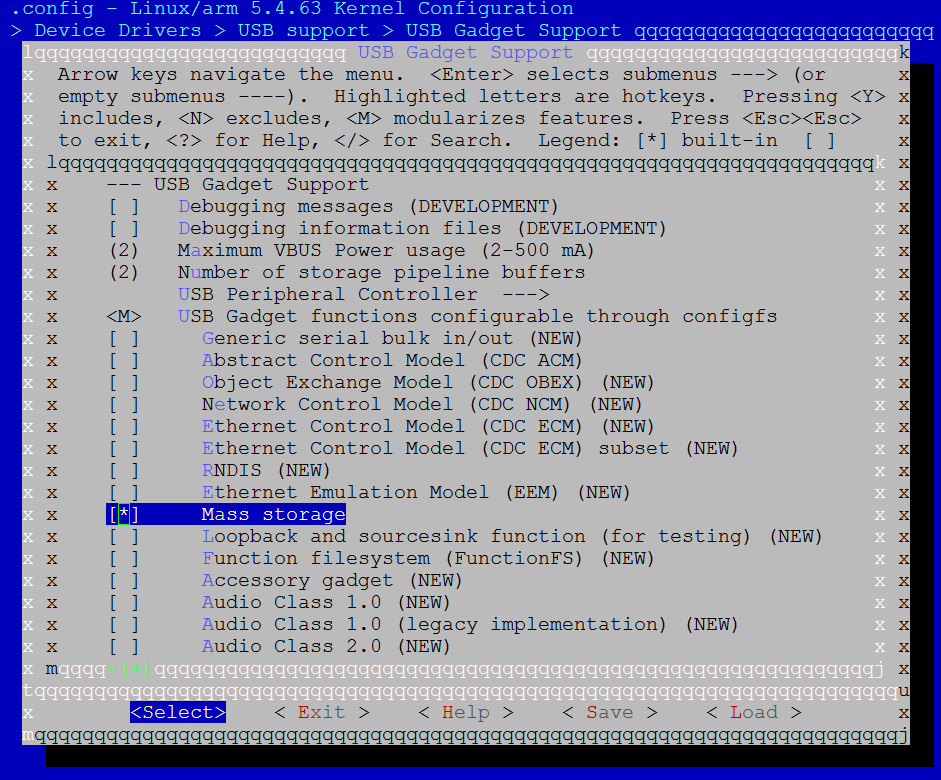
Module Configuration
Select the following items in USB Gadget Support:
Type
Mto select USB Gadget functions configurable through configfsType
Yto select Mass storage
Load kernel modules about MSC class after loading common USB device modules.
insmod /lib/modules/<kernel_ver>/kernel/drivers/usb/gadget/function/udc-core.ko
insmod /lib/modules/<kernel_ver>/kernel/drivers/usb/gadget/function/usb_f_mass_storage.ko
insmod /lib/modules/<kernel_ver>/kernel/drivers/usb/gadget/function/libcomposite.ko
APIs for Application
Usage
Example to set the board as a USB gadget mass storage device, with SD card as storage media:
Configure SD card of the board, refer to Chapter SDIO Host for details.
Connect the board to PC.
Run the following commands in board console.
mkdir /mnt/config mount none /mnt/config -t configfs cd /mnt/config/usb_gadget mkdir msc && cd msc echo 0x0200 > bcdUSB echo 0x8730 > idProduct echo 0x0BDA > idVendor mkdir strings/0x409 echo "Realtek" > strings/0x409/manufacturer echo "MSC" > strings/0x409/product echo "123456789AB" > strings/0x409/serialnumber mkdir configs/c.1 echo 120 > configs/c.1/MaxPower mkdir configs/c.1/strings/0x409 echo "mass_storage" > configs/c.1/strings/0x409/configuration mkdir functions/mass_storage.0 echo /dev/mmcblk0 >functions/mass_storage.0/lun.0/file echo 1 > functions/mass_storage.0/lun.0/removable echo 0 > functions/mass_storage.0/lun.0/nofua ln -s functions/mass_storage.0 configs/c.1/ echo 40080000.usb > UDC
The board will be recognized as a UDISK on PC.
Vendor Class
Vendor class is designed for user to develop customized USB device class.
Configuration
Besides the common USB device configurations, extra configurations are required to support USB vendor class driver, and user can choose to configure it as built-in functions or independent kernel modules.
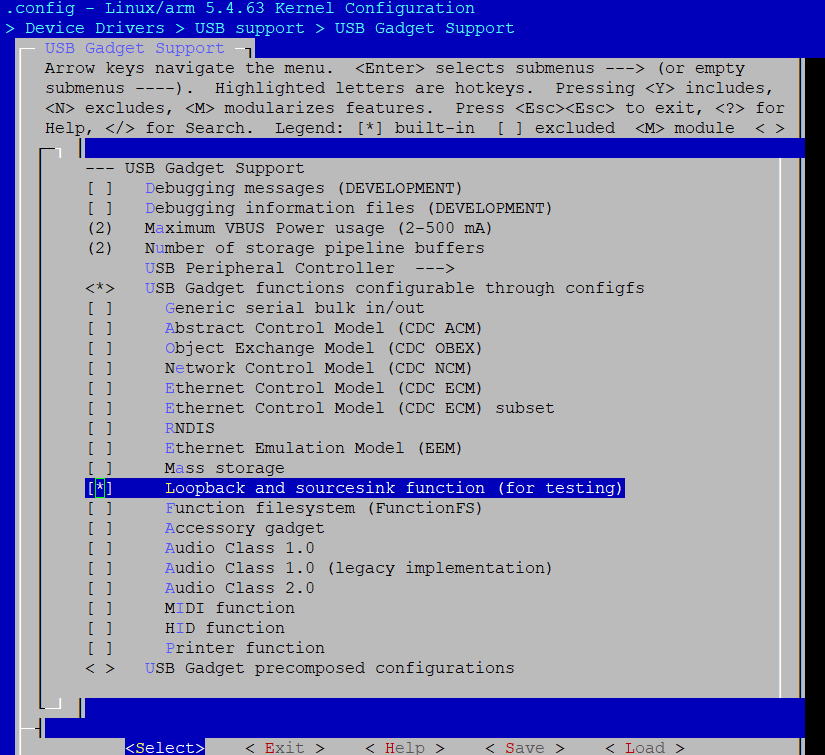
Built-in Configuration
Type
Yto select the following options in USB Gadget Support:USB Gadget functions configurable through configfs
Loopback and sourcesink function (for testing)
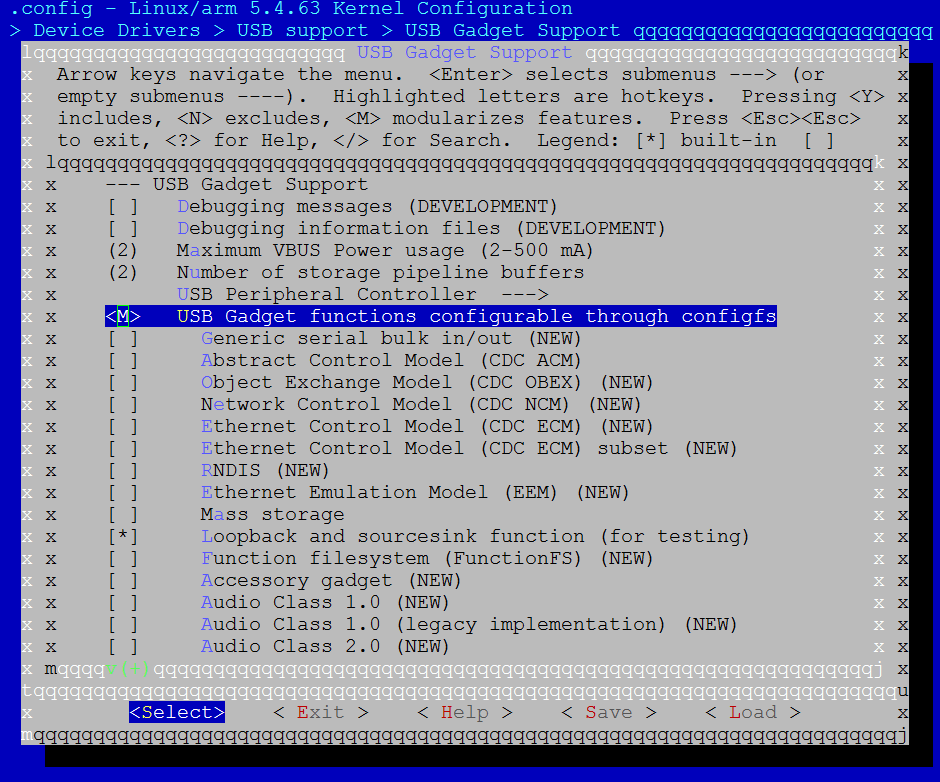
Module Configuration
Select the following options in USB Gadget Support:
Type
Mto select USB Gadget functions configurable through configfsType
Yto select Loopback and sourcesink function (for testing)
Load kernel modules about vendor class after loading common USB device modules.
insmod /lib/modules/<kernel_ver>/kernel/drivers/usb/gadget/function/udc-core.ko insmod /lib/modules/<kernel_ver>/kernel/drivers/usb/gadget/function/usb_f_ss_lb.ko insmod /lib/modules/<kernel_ver>/kernel/drivers/usb/gadget/function/libcomposite.ko
APIs for Application
None.
Usage
Here are the steps to test USB gadget vendor class:
Run the following commands in board console.
mkdir /mnt/config mount none /mnt/config -t configfs cd /mnt/config/usb_gadget mkdir vendor && cd vendor echo 0x0200 > bcdUSB echo 0xa4a0 > idProduct echo 0x0525 > idVendor mkdir strings/0x409 echo "Realtek" > strings/0x409/manufacturer echo "Vendor" > strings/0x409/product echo "123456789AB" > strings/0x409/serialnumber mkdir configs/c.1 mkdir configs/c.2 echo 120 > configs/c.1/MaxPower echo 120 > configs/c.2/MaxPower mkdir configs/c.1/strings/0x409 mkdir configs/c.2/strings/0x409 echo "vendor1" > configs/c.1/strings/0x409/configuration echo "vendor2" > configs/c.2/strings/0x409/configuration mkdir functions/SourceSink.0 mkdir functions/Loopback.0 ln -s functions/SourceSink.0 configs/c.1/ ln -s functions/Loopback.0 configs/c.2/ echo 40080000.usb > UDC
Note
Since vendor class is a composite device, so:
ln -s functions/SourceSink.0 configs/c.1/ means default function is sourcesink.
ln -s functions/Loopback.0 configs/c.1/ means default function is loopback.
Connect the board to USB host vendor.
Host vendor and device vendor test each other.
Function
Configfs setting
Host console command
Device console command
loopback
ln -s functions/Loopback.0 configs/c.1/
testusb -a -c1 -t30 -s256 -g32 -v1
No need command
sourcesink
ln -s functions/SourceSink.0 configs/c.1/
testusb -a -c1 -tx -s256 -g32 -v1
No need command
Note
For host testing driver, case 30 is used to test loopback function, so host command -t30 cannot change, other parameters can be modified by user. Case 0~29 are used to test sourcesink function, so -tx, x means a number in 0~29.