Introduction
Architecture
The I2C driver follows Linux framework: i2c-core-base.c, i2c-core-of.c, i2c-dev.c, i2c-boardinfo.c. The I2C software architecture is illustrated below.

Refer to I2C for more details of I2C framework.
Implementation
The I2C driver is implemented as following files:
File |
Description |
|---|---|
|
I2C driver Kconfig |
|
I2C driver Makefile |
|
I2C core functions. |
|
I2C master functions. |
|
I2C slave functions. |
|
I2C related function declaration, macro definition, structure definition and the other header files quoted. |
Configuration
DTS Configuration
I2C DTS:
i2c0: i2c0@4200F000 {
compatible = "realtek,ameba-i2c";
reg = <0x4200F000 0x100>;
interrupts = <GIC_SPI 22 IRQ_TYPE_LEVEL_HIGH>;
clocks = <&rcc RTK_CKE_I2C0>;
rtk,i2c-index = <0>;
rtk,use-poll-type = <0>;
rtk,i2c-clk = <100000>;
rtk,wait-timeout = <0x1000>;
rtk,i2c-reg-slave-num = <0>;
status = "disabled";
};
Property Description
Property |
Description |
Configurable? |
|---|---|---|
compatible |
The description of I2C driver: “realtek,ameba-i2c”. |
No |
reg |
The hardware address and size for I2C device: <0x4200F000 0x100>. |
No |
interrupts |
The GIC number of I2C device: <GIC_SPI 22 IRQ_TYPE_LEVEL_HIGH>. |
No |
clocks |
The clock of I2C device: <&rcc RTK_CKE_I2C0>. |
No |
rtk,use-poll-type |
0: interrupt mode (default) 1: poll mode |
0/1 |
rtk,i2c-clk |
Specifies the I2C Bus Clock (in Hz). |
1~400000 |
rtk,wait-timeout |
Setting 0x1000 means that I2C master will wait transfer for 4096ms, and then timeout. |
Yes |
rtk,i2c-reg-slave-num |
Register slaves on I2C bus.
|
0/1/2 |
status |
Whether enable this device.
|
Yes |
Pinmux
I2C device |
Port name |
Pin name |
pinctrl description |
|---|---|---|---|
I2C0 |
PA0 |
SDA |
<&i2c0_pins> |
I2C0 |
PA1 |
SCL |
<&i2c0_pins> |
I2C0 |
PA5 |
SDA |
Shall revise pins in i2c0_pins |
I2C0 |
PA6 |
SCL |
Shall revise pins in i2c0_pins |
I2C0 |
PA9 |
SDA |
Shall revise pins in i2c0_pins |
I2C0 |
PA10 |
SCL |
Shall revise pins in i2c0_pins |
I2C0 |
PA30 |
SDA |
Shall revise pins in i2c0_pins |
I2C0 |
PA31 |
SCL |
Shall revise pins in i2c0_pins |
I2C0 |
PB5 |
SDA |
Shall revise pins in i2c0_pins |
I2C0 |
PB6 |
SCL |
Shall revise pins in i2c0_pins |
I2C0 |
PB29 |
SDA |
Shall revise pins in i2c0_pins |
I2C0 |
PB30 |
SCL |
Shall revise pins in i2c0_pins |
I2C1 |
PA3 |
SDA |
Shall revise pins in i2c1_pins |
I2C1 |
PA4 |
SCL |
Shall revise pins in i2c1_pins |
I2C1 |
PA13 |
SDA |
Shall revise pins in i2c1_pins |
I2C1 |
PA14 |
SCL |
Shall revise pins in i2c1_pins |
I2C1 |
PA20 |
SDA |
Shall revise pins in i2c1_pins |
I2C1 |
PA21 |
SCL |
Shall revise pins in i2c1_pins |
I2C1 |
PA24 |
SDA |
Shall revise pins in i2c1_pins |
I2C1 |
PA25 |
SCL |
Shall revise pins in i2c1_pins |
I2C1 |
PB12 |
SDA |
<&i2c1_pins> |
I2C1 |
PB13 |
SCL |
<&i2c1_pins> |
I2C1 |
PB25 |
SDA |
Shall revise pins in i2c1_pins |
I2C1 |
PB26 |
SCL |
Shall revise pins in i2c1_pins |
I2C2 |
PA7 |
SDA |
Shall revise pins in i2c2_pins |
I2C2 |
PA8 |
SCL |
Shall revise pins in i2c2_pins |
I2C2 |
PA11 |
SDA |
Shall revise pins in i2c2_pins |
I2C2 |
PA12 |
SCL |
Shall revise pins in i2c2_pins |
I2C2 |
PA15 |
SDA |
Shall revise pins in i2c2_pins |
I2C2 |
PA16 |
SCL |
Shall revise pins in i2c2_pins |
I2C2 |
PA28 |
SDA |
Shall revise pins in i2c2_pins |
I2C2 |
PA29 |
SCL |
Shall revise pins in i2c2_pins |
I2C2 |
PB4 |
SDA |
Shall revise pins in i2c2_pins |
I2C2 |
PB3 |
SCL |
Shall revise pins in i2c2_pins |
I2C2 |
PB10 |
SDA |
<&i2c2_pins> |
I2C2 |
PB11 |
SCL |
<&i2c2_pins> |
Note
The pinmux can be revised according to specific conditions in <dts>/rtl8730e-pinctrl.dtsi.
Refer to pinctrl application note for more details.
I2C Group
The I2C group has three I2C devices named I2C0, I2C1 and I2C2. The usage of I2C devices are the same.
aliases {
i2c0 = "/ocp/i2c0@0x4200F000";
i2c1 = "/ocp/i2c1@0x400EF000";
i2c2 = "/ocp/i2c2@0x400F0000";
};
Build Configuration
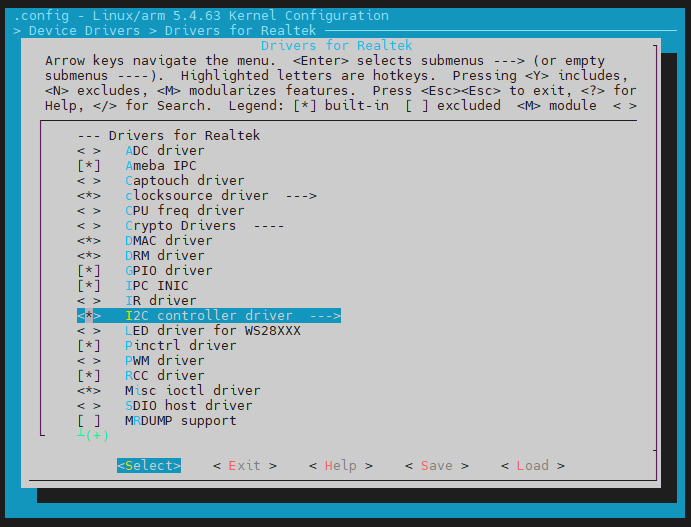
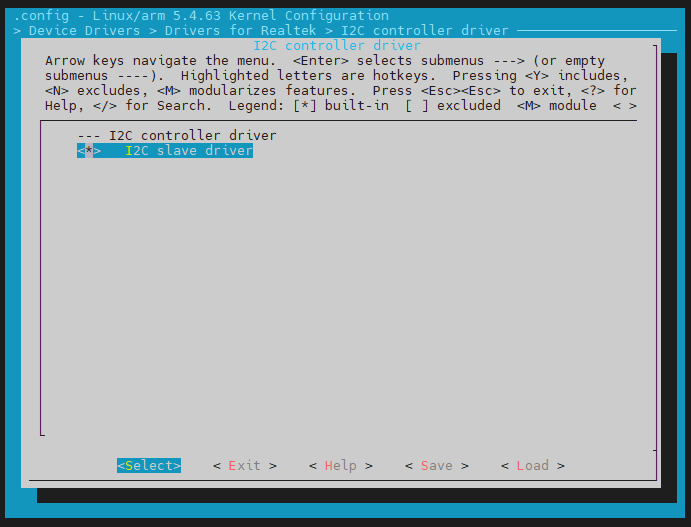
Select Drivers for Realtek > I2C controller driver. If I2C slave mode is expected, enter I2C controller driver and enable I2C slave driver.
APIs
APIs for User Space
Master Mode
The I2C master interfaces for user space are provided by <linux>/drivers/i2c/dev.c. Here are some commonly used APIs to control I2C device.
Interfaces |
Introduction |
|---|---|
i2cdev_open |
Open an I2C device. |
i2cdev_release |
Release an I2C device. |
i2cdev_ioctl |
Configure I2C parameters, control read/write I2C data. |
i2cdev_write |
Call I2C driver to send a message. |
i2cdev_read |
Call I2C driver to read a message. |
Note
For more details, refer to the official document in I2C Device Interface
The I2C master demo for user space is located at <test>/i2c.
Slave Mode
None.
APIs for Kernel Space
Master Mode
The I2C master interfaces for kernel space are provided by <linux>/drivers/i2c/i2c-core-base.c. Here are some commonly used API to control I2C master device.
Interfaces |
Introduction |
|---|---|
module_i2c_driver |
Register an I2C client module. |
i2c_transfer |
Call I2C driver to send a message or read a message. msg->flags & I2C_M_RD = 1 // read msg->flags & I2C_M_RD = 0 // write |
Note
For more details, refer to Writing I2C Clients
Slave Mode
The I2C slave interfaces for kernel space are provided by <linux>/drivers/i2c/i2c-core-slave.c. Here are some commonly used API to control I2C slave device.
Interfaces |
Introduction |
|---|---|
i2c_slave_register |
Register an I2C slave device. |
i2c_slave_unregister |
Unregister an I2C slave device. |
Note
For more details, refer to I2C slave interface
The I2C slave demo is located at <test>/i2c-slave. Pay attention to modify the rtk, i2c-reg-slave-num parameter in Property Description to configure an I2C core for the slave.